采用了硬件i2c1,读取挺快的,hal库移植很方便,可以很快地移植到f4等平台
”MPU6050 MPU6050DMP库 HAL库MPU6050 STM32 硬件IIC通信MPU6050“ 的搜索结果
通过STM32 Cubermx 实现 硬件I2C对MPU6050的操作,包括DMP的移植,程序代码注释详细,有部分程序代码摘录于正点原子的函数, 基于STM32F407ZG 芯片开发
STM32F103C8T6-HAL库-硬件IIC通信的MPU6050-DMP库移植示例完整工程
提示:该资源不需要积分 HAL库适用,使用硬件iic。 本人使用环境:Clion+Cubemx 经测试stm32F103C8T6及stm32F103ZET6都可使用 如果是F4系列的应该也没问题 无法下载请与我联系
cubemx生成hal库的f103c8t6工程,通过IIC读取mpu6050,通过dmp计算欧拉角,通过串口1(波特率15200)打印出数据,目前只打印pitch,可以自己修改,引脚信息可以自己在cubemx看。其中IIC驱动移植于野火,可以通过修改四...
HAL库MPU6050DMP库文件

dmp移植 cubeide设置 I2C1通道可选择三种不同的通讯协议:I2C、SMBus-Alert-mode、SMBus-two-wire-Interface。 SMBus (System Management Bus,系统管理总线), 为系统和电源管理这样的任务提供了一条控制总线,...
基于STM32F103C8T6CbueMX硬件HAL库IIC通信DMP6050DMP库的移植完整过程
文章主要讲述了mpu6050的姿态获取原理,使用HAL库编程时Cube MX的配置和Cube IDE编程,DMP解算MPU6050姿态的过程,附带开源代码。


mpu6050是有美国invenSense公司生产的一款传感器芯片,自带dmp(digital motion processor)数字运动处理器,有了它能够减少对mcu的资源消耗mpu是六轴传感器,三轴陀螺仪传感器,三轴角加速度传感器,还附带一个温度...
HAL库实现,移植了官方的DMP库。数据经过串口2用蓝牙发送。 用的IIC2,PB10和P11作为SCL和SDA. 感觉值有点问题
最近开始使用了6轴姿态传感器MPU6050,准备学习一下姿态融合,于是打算写下了这篇博客。

使用里面的DMP算法库,我这里使用的是STM32 F4的单片机。 一、cubemx配置 1、使用cubemx配置串口 配置了串口1 作为调试信息的输出; 串口1的波特率设置成了115200; 2、配置IIC1 和单片机连接的IIC总线我使用的是...
【代码】STM32F4/STM32F1手把手移植MPU6050欧拉角(HAL库,带源码)
基于HAL库移植MPU6050DMP库,获取角度解析姿态。
mpu6050_write_byte(uint8_t addr, uint8_t reg, uint8_t dat): 向MPU6050指定寄存器写入一字节数据的函数。mpu6050_read_byte(uint8_t addr, uint8_t reg, uint8_t *dat): 读取MPU6050指定寄存器的值的函数。MPU...


使用F103单片机的硬件I2C驱动 MPU6050使用DMP功能
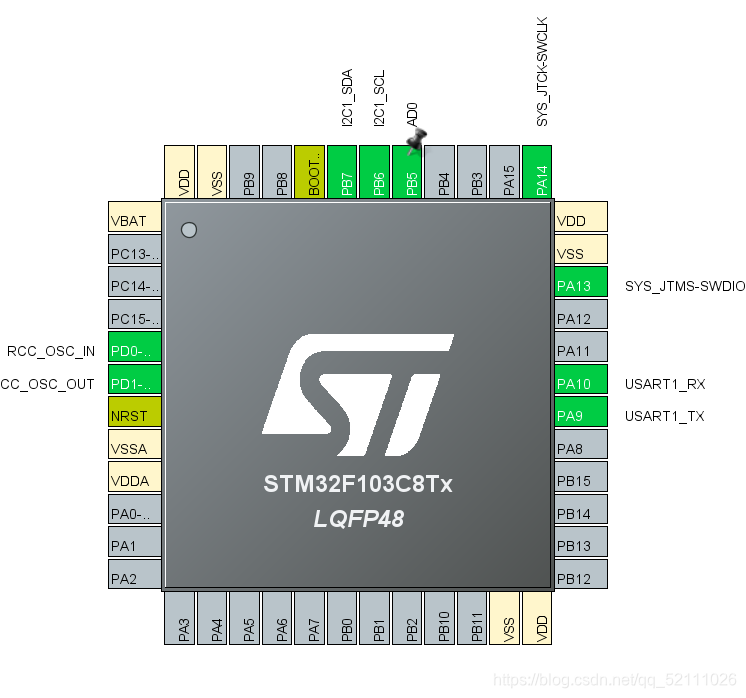
这里使用PB6/PB7分别作为IIC1的SCL时钟线/SDA数据线,可以分别设置Label SCL和SDA。

mpu6050_write_byte函数用于向MPU6050的指定寄存器写入单个字节的数据。mpu6050_get_accelerometer函数用于获取MPU6050的加速度值。mpu6050_read_byte函数用于...mpu6050_hw_init函数用于初始化MPU6050相关的硬件引脚。

MPU6050模块是一款由InvenSense公司生产的数字运动处理器,它集成了三轴陀螺仪和三轴加速度计,采用MEMS技术,可以通过I2C接口与其他微控制器进行通信。MPU6050模块中的加速度计和陀螺仪分别测量物体在三个轴上的加...
推荐文章
- MAC安装git的三种方式-程序员宅基地
- 基于风控特征相关度,挖掘贷中等场景中的存量客户价值|来看看相关实操_风控 建立存量客户的特征标签-程序员宅基地
- Internet Download Manager v6.36 Build 3 Final 注册版-IDM下载工具_ternet_download_manager 注册版-程序员宅基地
- 华为Java社招面试经历详解【已拿到offer】_广州华为java招聘-程序员宅基地
- IDCNAR 账龄未清应收负数问题解决 F-51清账 示意_sap idcnar-程序员宅基地
- linux线程的基本知识_linux加锁失败的状态符-程序员宅基地
- 000_coolprop_in_matlab在Matlab中使用CoolProp-程序员宅基地
- 认识数据湖加速器(Data Lake Accelerator Goose FileSystem,GooseFS)-程序员宅基地
- 人工智能:语音合成技术介绍_语音合成需要什么知识和技能-程序员宅基地
- 高斯混合模型是什么?什么是软聚类?高斯混合模型还能做什么?_bayesiangaussianmixture-程序员宅基地